Example: Run System
Showcases the API Usage of the run system proFit v0.5.dev
[1]:
import numpy as np
import matplotlib.pyplot as plt
Setup
The Worker
The simulation we want to run is wrapped in a Worker. We need to name the output variables, the input variables can be inferred from the simulations’s argument list.
As an alternative, the CommandWorker can be configured to run any command/executable. It will prepare a directory for each simulation, filling the input values according to a template and read the output files to transmit them back.
Note: for the LocalRunner and SlurmRunner it is only possible to use a custom Worker which is importable (e.g. defined in a separate file which is specified in the configuration). Custom Workers defined in a script or notebook can only be used with the ForkRunner for now.
[2]:
from profit.run import Worker
@Worker.wrap("simulation")
def simulation(u, v) -> "f":
return u * np.cos(v)
The Interface
To manage the flow of data between the Workers and the Runner, we choose and configure an Interface.
Memorymap Interface ( |
ZeroMQ Interface ( |
|---|---|
single memory mapped file |
messages via a protocol (tcp) |
only local, but fast |
local and distributed (HPC) |
[3]:
from profit.run import RunnerInterface
interface = RunnerInterface["memmap"](
size=10,
input_config={"u": {"dtype": float}, "v": {"dtype": float}},
output_config={"f": {"dtype": float, "size": (1, 1)}},
)
The Runner
The Runner is the central components of the run system which brings everything together. The Runner is also responsible for starting and distributing the individual Workers.
Fork Runner ( |
Local Runner ( |
Slurm Runner ( |
|---|---|---|
forking / |
via the shell / |
via the Slurm scheduler |
fastest, supports temporary Workers |
submits Slurm jobs (HPC) |
[4]:
from profit.run import Runner
runner = Runner["fork"](
interface=interface,
worker="simulation", # don't require the Worker, just it's label or config dictionary
)
Running
[5]:
runner.next_run_id = 0 # reset Runner
runner.spawn({"u": 1.2, "v": 2})
U = np.random.random(9)
V = np.linspace(0, 2, 9)
parameters = [{"u": u, "v": v} for u, v in zip(U, V)]
runner.spawn_array(parameters, progress=True, wait=True)
submitted: 100%|██████████| 9/9 [00:00<00:00, 19.82it/s]
finished : 100%|██████████| 10/10 [00:00<00:00, 98.31it/s]
Results
[6]:
import pandas as pd
pd.DataFrame(runner.input_data).join(pd.DataFrame(runner.output_data))
[6]:
| u | v | f | |
|---|---|---|---|
| 0 | 1.200000 | 2.00 | -0.499376 |
| 1 | 0.382964 | 0.00 | 0.382964 |
| 2 | 0.887557 | 0.25 | 0.859965 |
| 3 | 0.176309 | 0.50 | 0.154726 |
| 4 | 0.846768 | 0.75 | 0.619570 |
| 5 | 0.944341 | 1.00 | 0.510230 |
| 6 | 0.483903 | 1.25 | 0.152585 |
| 7 | 0.832679 | 1.50 | 0.058901 |
| 8 | 0.320214 | 1.75 | -0.057077 |
| 9 | 0.993055 | 2.00 | -0.413257 |
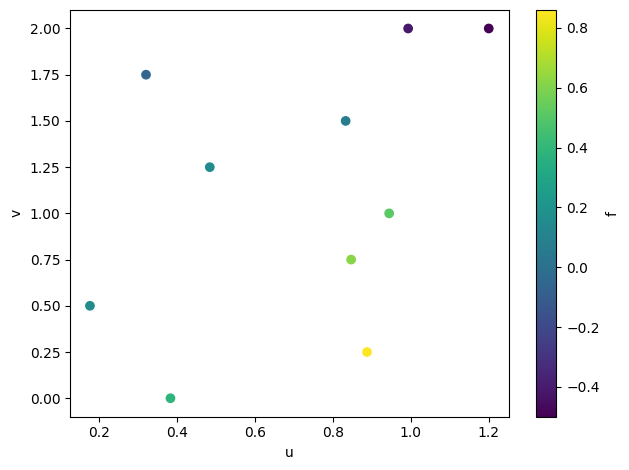
[7]:
fig, ax = plt.subplots(tight_layout=True)
sc = ax.scatter(
runner.input_data["u"], runner.input_data["v"], c=runner.output_data["f"]
)
plt.colorbar(sc, ax=ax, label="f")
ax.set(
xlabel="u",
ylabel="v",
)
None
Clean Runner & Interface
[8]:
runner.clean()